
A drone works and flies like an intelligent air unit that can cover large distance when used with powerful batteries, is made from different light composite materials in order to increase maneuverability while flying and reduce weight. In this informative article, we will discuss how do drones work and fly, the features of drone motors and propellers , how they are working and how can be specified. So, without much further adue, let’s start our journey through the world of drones!
How do drones work and fly ? |
When you first start out, push the sticks, Transmitter sends signals to Flight controller, the FC sends orders after processing to the Electronic Speed Controllers (ESCs) of each motor, the ESC directs its motor to increase or decrease speed, which in turn provide the necessary thrust to its propeller(see below diagram).

In the flight control each rotor produces thrust and torque about its center of rotation, as well as a drag opposite to the vehicle’s direction of flight. If all rotors spin at the same angular velocity, with rotors marked 2 and 3 rotating clockwise and rotors marked 0 and 1 counterclockwise, the net aerodynamic torque, and subsequently the angular acceleration about the yaw axis, is exactly zero, which implies that the yaw stabilizing rotor of conventional helicopters is not needed. Yaw is induced by mismatching the balance in aerodynamic torques (i.e., by offsetting the cumulative thrust commands between the counter-rotating blade pairs).

The 4 rotors aligned take the shape of a square. Two on opposite sides of the square rotate in clockwise direction and the other two rotate in the opposite direction. If all rotors turn in the same direction, the craft would spin just like the regular helicopter without the tail rotor. Yaw is induced by unbalanced aerodynamic torques. The aerodynamic torque of the first rotors‟ pair cancelled out with the torque created by the second pair which rotates in the opposite direction. Hence if all four rotors apply equal thrust the quadcopter will stay in the same direction.
For balance, the quadcopter should continuously take the required measurements from the sensors, and make alterations to the speed of each rotor to maintain the body level. These adjustments usually are done automatically by a sophisticated control system on the quadcopter in order to stay perfectly balanced.
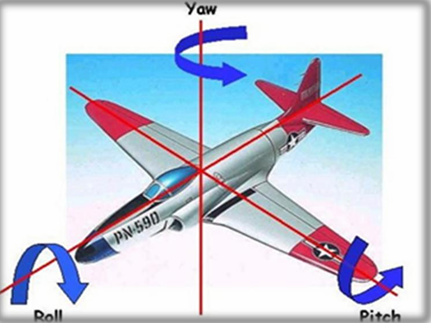
A quadcopter has four controllable degrees of freedom, namely: Yaw, Roll, Pitch, and Altitude. Each degree of freedom can be controlled by adjusting the thrusts of each rotor. In an aeroplane, it is given by:


Similar to an aeroplane, the movements of a quadcopter also contain- roll, yaw and pitch.
- Roll (tilting left and right) – Controlled by increasing speed of one motor and lowering the opposite one.
- Pitch (moving up and down) – Same way as roll, but second pair of motors are used.
- Yaw (turning left and right) – Controlled by turning up the speed of the regular rotating motors and taking away power from the counter rotating.


For rolling or pitching, one rotor’s thrust should decrease and the opposite rotor’s thrust should increase by the same amount, which causes the quadcopter to tilt. When it tilts, the force vector is split into the horizontal and the vertical component. Due to this, firstly, the quadcopter begins to travel opposite to the direction of the newly created horizontal component. Secondly, because the force vector has been split, the vertical component will be smaller, causing the quadcopter beginning to fall. In order to keep the quadcopter stable, the thrust of each rotor should then be increased in order for compensation.





How does drone motor works ? |
Understanding the specifications of drone motors and how they work is important for any hobbyist. There may come a time when you will want to replace a burned-out motor, upgrade your existing drone motors, or even build a drone.
This part serves to help you understand the basics of drone motors so you can pick the best drone motor that meets your requirements and budget.
The purpose of motors is to convert electrical power to mechanical power in the form of rotary motion. This electromechanical system is characterized by a few specific parameters that, if known, can help one predict the performance of the motor in a system. These parameters include the no-load and stall speed, torque, current, and voltages, as well as Efficiency.
The motor of your quadcopter is what your propellers are connected to which cause them to spin around and generate thrust to enable your drone to fly. Quadcopters require Brushless DC motors (BLDC motors). Being brushless they are wear resistant, achieve greater speeds and thereby generate a high amount of thrust required to lift the quadcopter up.
Brushless motors are very powerful, have excellent torque without needing to use gears, and have a very long lifespan if treated properly. These motors are the ones you’ll usually find on photography multirotors like the DJI Phantom series (Phantom 4 Pro…), 3DR Solo, Yuneec Q500 series, Traxxas Aton, and in racing drone multirotors like the 250mm kit quadcopters.
Brushless motor components:
DC motors consist of one set of coils, called armature winding, inside another set of coils or a set of permanent magnets, called the stator. Applying a voltage to the coils produces a torque in the armature, resulting in motion.

The brushless motor consists of two main sections:
Stator:
The stator is the stationary outside part of a motor.
The stator of a permanent magnet dc motor is composed of two or more permanent magnet pole pieces. The magnetic field can alternatively be created by an electromagnet. In this case, a DC coil (field winding) is wound around a magnetic material that forms part of the stator.
Rotor:
The rotor is the inner part which rotates, is composed of windings (called armature windings).
Both stator and rotor are made of ferromagnetic materials. The two are separated by air-gap.
Inrunner and Outrunner motors:
 There are two categories of brushless motors however with multirotors and most fixed wing aircraft you will only encounter out-runner motors are pictured above. The difference between the two is that out-runners have the rotor on the outer area of the motor, and in-runner motors have the rotating part on the inside while the outer shell remained stationary. In-runner motors are often used with R/C cars as they can spin much faster than out-runner motors. However out-runner motors are able to produce more torque which allows them to drive larger propellers used on aircraft and multirotors.
There are two categories of brushless motors however with multirotors and most fixed wing aircraft you will only encounter out-runner motors are pictured above. The difference between the two is that out-runners have the rotor on the outer area of the motor, and in-runner motors have the rotating part on the inside while the outer shell remained stationary. In-runner motors are often used with R/C cars as they can spin much faster than out-runner motors. However out-runner motors are able to produce more torque which allows them to drive larger propellers used on aircraft and multirotors.
Parameters of brushless dc motor:
As you shop around for some brushless motors you will notice that there is often a trend in motor naming with a series of 4 numbers and might wonder what those numbers mean. It’s simple enough; most motors have a few letters followed by 4 number. The letters hold no significance (usually a model or series name, such as MT series motors, or Q series for quadcopter), whereas the numbers tell you the essential measurements of the motor.

Brushless motors are typically categorized by a four-digit number (see above image: 2212) – such as **##. Where as the “**” numbers are the stator width and “##” is the stator height. Essentially, the wider and taller the motor is, the larger the numbers are and the more torque it can produce.
The size of the motor can give you an idea about what size drone you will use with the motor. Typical FPV racing miniquads will use 1806 or 2204 motors, whereas larger quadcopters that are designed to carry a GoPro camera will typically be around the 2212 size.
KV Rating:
KV is an essential parameter. It is the theoretical increase of motor rpm (rotation per minute) when the voltage goes up by 1 volt without load. This Kv rating gives you the rpm a motor will spin at full throttle, given a certain voltage.
This rate of spin is quantified using revolutions per minute i.e. rpm
The Kv rating gives you the rpm of the motor in the following way:
![]()
You may infrequently observe something like “12N14P”. The number before the letter N refers to the quantity of electromagnets in the stator, and the number before P refers to the quantity of perpetual magnets in the motor.
Magnet Configuration (N and P):
The configuration number tells you how many electromagnets there are on the stator, and the number of permanent magnets there are on the rotor. The number before the letter N refers to refers to the quantity of electromagnets in the stator. And the number before P refers to the quantity of perpetual magnets in the motor.
Most motors have the same 12N14P arrangement; however, some lower KV motors have more electromagnets and lasting magnets to expand torque and be more productive (and would be more costly).
The Other Parameters of Brushless DC Motor:
When investigating and looking into which motors to buy, there are a few parameters that are useful to know and recognize.
Efficiency:
The next important feature for anyone considering motors is efficiency. It is intuitive why high efficiency is desired in any motor. As they can run for longer and higher efficiency results in less heat produced. If this is the case, the motors can be pushed harder at any given moment, or over a long period of time.
The most basic and general equation for calculating efficiency is the following:

The power in is calculated using the formula V × I where V is voltage and I is current. Intuitively, the power out of the motor is the power put into it, minus the energy that is necessarily lost i.e. power out = power in− power lost. There are two main ways that a motor can lose efficiency; copper loss and iron loss.
Copper Loss:
It is the loss of energy through heat. To calculate this value, we need to incorporate the electrical resistance of the motor, denoted by Rw. This quantity is measured in Ohms. And once we have this value, we can go on to easily calculate the copper loss with:
![]()
This is measured in Watts.
Iron Loss:
Iron loss is a little less intuitive but nonetheless important. This quantity explains the power lost due to the fluctuating magnetic fields in the motor. To calculate this term, we need to know the amount of current the motor needs to run when it is unloaded denoted by I0. With this term, we calculate the iron loss as follows
![]()
Combining these two losses together, we obtain the total power lost. And so we can now calculate the efficiency of a motor. This is given by

How do drone propellers work ? |
A propeller is the most common propulsion device used in drones. A propeller is composed of a number of blades that rotate around an axis, to produce thrust by pushing air much like a fan does. A propeller’s performance is determined by its geometry. And different propeller geometries are optimized to produce thrust efficiently at given rotational and forward flight speeds.
Propeller Size:
The first thing most people notice about propellers is their size. They exist in different diameter and pitch:

Diameter of the propeller is the distance from tip to tip of a prop. The diameter of a prop is directly related to amount of thrust produced by this prop.

Pitch called actually the pitch length; it can be defined as the travel distance of one single prop rotation. So if your props have a 4″ pitch will move the quadcopter 4″ forward for every revolution they turn.
The larger the prop (either increasing diameter, or pitch or both), the more energy it takes to spin it.
Propeller Specification:
There are 2 types of format that manufacturers use.
L x P x B or LLPP x B
L- length, P – pitch, B – number of blades.
For example 6×4.5 (also known as 6045) propellers are 6 inch long and have a pitch of 4.5 inch. Another example, 5x4x3 (sometimes 5040×3) is a 3-blade 5″ propeller that has a pitch of 4 inch.
“BN” indicates Bullnose props.
Sometimes you might see “R” or “C” after the size numbers, such as 5x3R. R indicates the rotation of the propeller, which stands for “reversed”. It should be mounted on a motor that spins clockwise. C is the opposite, should be used with motors that spins counter-clockwise.
Propeller Material:

Propellers can be made of different materials including plastic, carbon fiber, wood etc. Distinctive capabilities and features can be realized from each type of materials. For example carbon fiber and wooden propellers are a little difficult and known for their smooth performance on flight. While Props made of plastic are better on side of sustainability and reliability.
In fact, a lot of the pilots in this hobby are now using plastic props. They last a lot longer and could save you money in the long run. However, as they do not just break, they bend. It is not obvious in appearance. But it can cause vibrations to your quadcopter, which can complicate the life of your flight controller and cause overheating of the engine. When using these types of props be sure to pay attention to vibrations and oscillations.
Propeller Shape:

Another important parameter that plays a crucial role in the performance of your quadcopter is the shape of the propellers. The most important difference between helices is their spikes: sharp nose, bull nose (bull’s nose) and hybrid bullnose (HBN). Propellers of the same size and height are the most efficient with sharp points and less thrust. Bare-end propellers generate more thrust but simultaneously draw more power from the batteries. This is mainly due to their larger area as opposed to those with tiny spikes.
Number of blades:

Double blade propellers are the most used propellers. Drone pilots and freestyle drones like three blade propellers. Four-blade and hex-blade propellers are also available on the market. In fact, by adding more blades, it actually adds more surface area. And therefore generates more thrust at the expense of higher battery current consumption and more drag.
Propeller thrust and speed:
Thrust is generated from a propeller due to the pressure difference between the front and the rear of the prop. For a quadcopter, the 4 propellers work together to produce thrust that lifts the quad off the ground. By changing the amount of thrust of each prop, a quadcopter can move forward, backwards, side to side and rotate.
It’s important to look up motor thrust tests data. And see which props work best with the motor you plan to use. The same propeller can perform very differently on 2 different motors due to design, torque, power etc. Thrust is often measured in grams.
The speed of the prop is usually measured in rotations/revolutions per minute (RPM). Speed is directly related to thrust.
Increase the speed, increase the thrust. Decrease the speed, decrease the thrust.
One problem that increasing the speed of a prop creates is drag. So as the speed increases, you not only get more thrust but the prop also gets more difficult to turn. More difficult to turn means more torque is required from your motor.
Different propeller directions CW vs CCW:

On every quadcopter, there are two 2 props have to turn clockwise (CW) and 2 have to turn counter-clockwise (CCW) in order to generate thrust. As well as They have to cancel out rotation of quadcopter about its center (by opposing yaw motion) while flying.
When you buy propellers, make sure they come in pairs or grab both CW and CCW propellers if sold separately.
How do drones Work and fly — Video: |
Conclusion
So, these are the basics of how do drones works and fly, with an overview of motors and propellers features. Your quadcopter can attain higher levels of efficiency with a well balanced blend of appropriate motor and propeller. It will also enhance your battery output but will also allow you to exercise greater control over your device.
We hope this article has helped you on your way to make your own drone.

