
when you are completely new to drone technology, you can’t just come and make a quadcopter that can do everything for you, and you can’t know the issue if you have a flight problem.
First you should learn, understand and know the parts and components of drone, this will give you extra confidence while flying. You will also know which components to inspect on a regular basis and the drone parts which are easy to replace or upgrade.
There are several components that make up a drone; in this article you will find all information on modern drone parts and components.
Frame of a drone |

It is the structure that holds or houses all the components together. It prevents them from vibrations. They are designed to be strong and lightweight; you have to be very precise while making it.
To decide the appropriate frame for the copter, they are 3 factors, i.e. weight, size and materials used. It consists of 2-3 parts which are not necessarily of the same material:
- The center plate where the electronics are mounted
- Four arms mounted to the center plate
- Four motor brackets connecting the motors to the end of the arms
Frames are usually made of:
- Carbon Fiber- Carbon fiber is the most rigid and vibration absorbent but it is the most expensive too.
- Aluminium- Hollow aluminium square rails are the most popular for the arms due to its light weight (200-250grams), rigidness and affordability. However aluminium can suffer from motor vibrations, as the damping effect is not as good as carbon fiber. In cases of severe vibration problem, it could mess up sensor readings.
- Wood/ Plywood /MDF (Medium-density fibreboard)- Wood boards like MDF plates could be used for the arms as they are better at absorbing the vibrations than aluminium. Unfortunately the wood is not a very rigid material and can break easily if the quadcopter crashes.

For the center plate, plywood is most commonly used because of its light weight, easy to work factor and good vibration absorbing features. As for arm length, “motor-to-motor distance” is sometimes used, meaning the distance between the centers of one motor to that of another motor of the same arm. The motor to motor distance usually depends on the diameter of the propellers in order to have enough space between the propellers.
Making frame is truly depends on your imagination, skill and availability of material. But it is fun building frame from scratch and you will learn many things from it.
Drone Propellers |

A quadcopter has four propellers, two “normal” propellers that spin counter- clockwise, and two “pusher” propellers that spin clockwise to avoid body spinning. By making the propeller pairs spin in each direction, but also having opposite tilting, all of them will provide lifting thrust without spinning in the same direction. This makes it possible for the copter to stabilize the yaw rotation, which is the rotation around itself. The propellers come in different diameters and pitches (tilting effect). The larger diameter and pitch is the more thrust the propeller can generate. It also requires more power to drive it, but it will be able to lift more weight. When using high RPM (Revolutions per minute) motors, the smaller or mid-sized propellers. When using low RPM motors the larger propellers can be used as there could be trouble with the small ones not being able to lift the quadcopter at low speed.
Most of propellers are made of plastic especially for the smaller drones but the more expensive ones are made of carbon fiber.
Drone Motors |

The purpose of motors is to spin the propellers. Brushless DC motors provide the necessary thrust to propel the craft.
Each rotor needs to be controlled separately by a speed controller.
The design of the motor is as important as the drone itself, this is because an efficient motor means you will be able to save on costs of purchase and maintenance costs.
They are a bit similar to normal DC motors in the way that coils and magnets are used to drive the shaft.
Though the brushless motors do not have a brush on the shaft which takes care of switching the power direction in the coils, and that’s why they are called brushless. Instead the brushless motors have three coils on the inner (center) of the motor, which is fixed to the mounting.
On the outer side, it contains a number of magnets mounted to a cylinder that is attached to the rotating shaft. So the coils are fixed which means wires can go directly to them and therefore there is no need for a brush.
Brushless motors spin in much higher speed and use less power at the same speed than DC motors. Also they don’t lose power in the brush-transition like the DC motors do, so it’s more energy efficient.
The KV (kilovolts)-rating in a motor indicates how many RPMs (Revolutions per minute) the motor will do if provided with x-number of volts.
The higher the kV rating is, faster the motor spins at a constant voltage.
Usually outrunners are used – brushless motors used for model planes and copters.
Basic structure of a brushless motor:
 The motors used on the quadcopter were brushless direct current, shortened DC, motors which mainly consist of two parts;
The motors used on the quadcopter were brushless direct current, shortened DC, motors which mainly consist of two parts;
the Stator and the Rotor, as seen in picture.
The Stator receives power which is run through coils to create electromagnets.
There are fixed permanent magnets fixed on the rotor and by changing the current and thereby the electromagnets polarity torque can be created.
A sensor is needed to match the current changes to the revolution speed.
Alternatively, the back electromotive force in the undriven coils can be measured in order to determine the rotor position.
Drone ESC – Electronic Speed Controller |
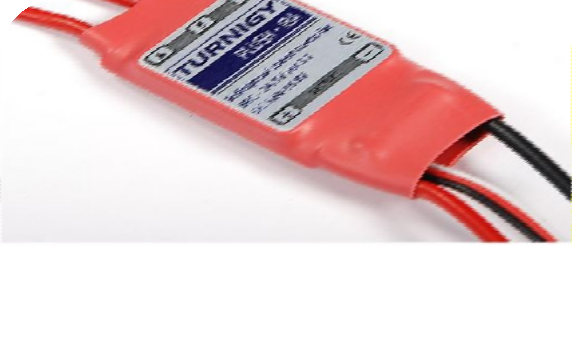
The electronic speed controller controls the speed of the motor or tells the motors how fast to spin at a given time.
The ESC is also responsible for the conversion of DC battery power to AC power to propel the brushless motors.
For a quadcopter, 4 ESCs are needed, one connected to each motor.
The ESCs are then connected directly to the battery through either a wiring harness or power distribution board.
Many ESCs come with a built in battery eliminator circuit (BEC), which allows to power things like the flight control board and radio receiver without connecting them directly to the battery.
Because the motors on a quadcopter must all spin at precise speeds to achieve accurate flight.
Modern drones depend entirely on the ESC for all their flight needs and for performance.
The firmware in an ESC changes the refresh rate of the ESC so the motors get many more instructions per second from the ESC, thus have greater control over the quadcopter’s behavior.
The frequency of the signals also vary a lot, but for a quadcopter it is preferred if the controller supports high enough frequency signal, so the motor speed can be adjusted quick enough for optimal stability.
More and more companies are coming up with better performing ESC that reduce power needs and increase performance, the latest one being the DJI ESC.
Drone Radio Transmitter & Receiver |
The radio transmitter and receiver allow controlling the quadcopter.
Four channels for a basic quadcopter is required, using a radio with 8 channels, so there is more flexibility as is recommended.
The receiver and the transmitter must use a single radio signal in order to communicate to the drone during flight.
Each radio signal has a standard code that helps in differentiating the signal from other radio signals in the air.
Quadcopters can be programmed and controlled in many different ways but the most common ones are by RC transmitter in either Rate (acrobatic) or Stable mode.
The difference is the way the controller board interprets the orientations feedback together with the RC transmitter joysticks.
In Rate mode only the Gyroscope values are used to control the quadcopter, the joysticks on the RC transmitter are then used to control and set the desired rotation speed of the 3 axes, though if the joysticks are released, it does not automatically balance again.
This is useful when the quadcopter is required to do stunts like tilting it a bit to the right.
The speed of the 4 motors will be adjusted automatically and constantly to keep the quadcopter balanced.
Drone Antenna |
Antennas are one of the most important components in your Drone system; they are tuned to specific frequencies so you can use a 2.4 GHz antenna with 5.8 GHz FPV equipment. 95% of the time we use 5.8 GHz for FPV.
The first concept that you should understand is antenna polarization.
There are two main categories of antennas, linear and circular polarized antennas.
Antennas are also classified on the directional polarization: Directional and Omni directional can apply to both linear and circular antennas.
Directional antennas are able to get more range, increasing range but reducing coverage. Directional antennas are able to focus into a long but narrow beam.
Omni directional antennas on the other-hand increasing its coverage while reducing range. These antennas have very wide beams, which are not very long.
Omni Directional Antennas:

Directional Antennas:

Omni directional antennas are great for everyday FPV flying as they provide great coverage and you don’t need to keep them pointed at your aircraft to ensure you get signal.
Directional antennas allow you to fly further away and still receive a good FPV signal, but because the beam is narrow you always need to ensure it is pointing at your drone.
Some drone systems combine two (or more) antennas on the ground receiver, to get the best of both Wolds.
Drone FC – Flight Controller |

The flight control board is regarded as the “brain” of the quadcopter.
It is responsible for all the commands that are issued to the drone by the pilot.
It houses the sensors such as the gyroscopes and accelerometers that determine how fast each of the quadcopter’s motors spin.
Flight control boards range from simple to highly complex.
The flight controller is also responsible for the regulation of the motor speeds through the ESC and for the steering of the drone.
Any commands such as triggering of the camera, controlling the autopilot mode and other autonomous functions are controlled by the flight controller.
An affordable, easy to set up and having a strong functionality controller is always recommended.
Such controllers can handle about any type of multirotor aircraft so if even we want to upgrade to a Hexacopter or experiment with a Tricopter, we need not purchase another board.
Drone Battery – Power Source |

The battery is the part of the drone that makes all actions and reactions possible.
Without the battery, the drone would have no power and would therefore not be able to fly.
LiPo (Lithium Polymer) batteries are used because it is light.
NiMH(Nickel Metal Hydride) is also possible, they are cheaper, butt heavier than LiPo. LiPo batteries also have a C rating and a power rating in mAh (which stands for milliamps per hour).
The C rating describes the rate at which power can be drawn from the battery, and the power rating describes how much power the battery can supply.
Larger batteries weigh more so there is always a tradeoff between flight duration and total weight.
There is a battery monitor on the drone that helps in providing battery information to the pilot to monitor the performance of the battery.
Drone MicroController & Intertial Measuring Unit (IMU) |
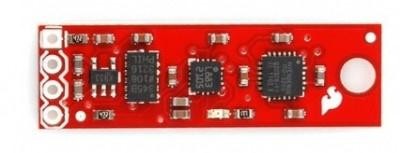
Sensors are connected to a microcontroller to decide on how to control the motors.
Depending on the level of autonomous a quadcopter should be, one or more such sensors can be used in combination.
The Inertial Measurement Unit (IMU) is the electronic sensor system of the quadcopter which measures velocity, orientation and gravitational forces of the quadcopter.
It calculates the orientation of the quadcopter – the three orientation angles, Roll, Pitch and Yaw. These angles are then fed into some controlling electronics that uses those angles to calculate the required changes in the motor speeds.
The IMU contains at least 6 sensors, referred to as 6DOF, these sensors should be a 3-axis accelerometer and a 3-axis gyroscope. Sometimes another sensor, a 3-axis magnetometer, is added for better Yaw stability (totally 9DOF).
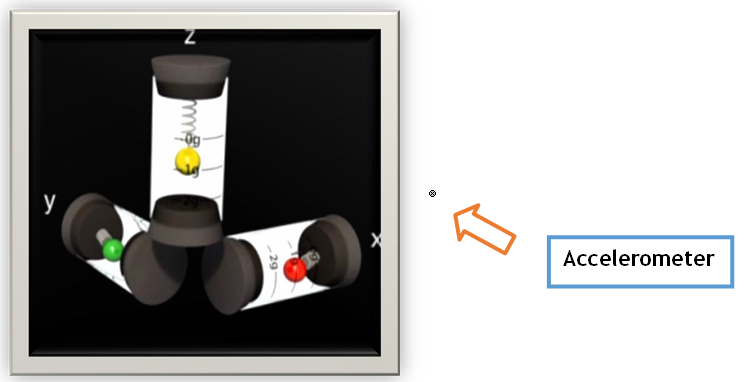
The accelerometer measures acceleration and force, so downward gravity can be measured too. It has 3 axis sensors, so the orientation can be worked upon also.
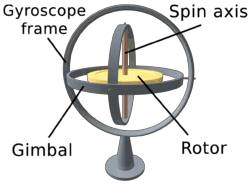
A gyroscope measures angular velocity or rotational speed around the three axis.
If accelerometer only is used then we can measure the orientation with reference to the surface of earth. Sometimes the accelerometer can be very sensitive and unstable because when the motor vibration is bad, the orientation is messed up. Therefore a gyroscope is used as a solution to this problem.
The gyroscope too drifts a lot. When the sensor rotates, the gyroscope will give the angular velocity, but when it stops rotating, it doesn’t necessarily go back to 0 deg/s.
The gyroscope readings will provide an orientation that continues to move slowly (drifts) even when the sensor stops rotating. Hence both the accelerator and the gyroscope sensors have to be used together to obtain a productive orientation.
Unfortunately, the accelerometer cannot sense yaw rotation. Hence a magnetometer is used for this purpose.
A magnetometer is a device that measures the directions and strength of the magnetic field.
It determines which way is south and north.
The pole locations are then used as a reference together with the Yaw angular velocity around from the gyroscope, to calculate a stable Yaw angle.

Drone GPS Module |

A GPS module measures your drone’s location by measuring how long a signal takes to travel from a satellite.
A GPS module is also able to give an estimation of your drone’s altitude, longitude and elevation points.
However GPS modules are rather inaccurate and will only give you a position to within 5m.
It helps drone navigate longer distances and capture details of specific locations on land.
The main feature used by the GPS module is that you can autonomously fly your drone to way-points, so your drone can potentially fly on its own from takeoff to landing.
In most modern drones, the GPS module helps in returning the drone safe to the controller in case it loses connection to the controller, this helps in keeping the drone safe.
Recently there are drone GPS modules that are able to communicate on more than on GPS network such as the Russian GLONASS network. This just means that your GPS receiver can find more satellite signals which improve the reliability and performance.
The nice thing is GPS modules that support both GPS and GLONASS networks are not much more expensive.
Since the GPS module needs to see the sky, it is often mounted on the top of your drone. When flying on a multi rotor most drone builders will use a GPS mast to mount the GPS module high up away from all the other electronics to ensure it gets a solid GPS signal.
Drone FPV Camera |

Camera is the key component of a drone that allows you to enjoy that ‘First Person View’.
It helps in taking photos and images from above which forms an important use of drones.
There are different camera types and qualities in the market and a variety to choose from.
It makes sense to take some time to choose the camera that will best suit the type of multirotor that you own, and flying that you would like to do.
You should take in consideration these main points when bought a camera:
- Aspect ratio: refers to the shape of the image that the Drone FPV Camera captures.
- Lens Field of View: Usually the lens options are given in millimeters and this number refers to the Focal length of the lens. A larger number means the lens will have a narrower FOV (Field of View) and a smaller number will have a wider FOV.
- Sensor Type: The sensor in your FPV camera is the component responsible for capturing the light/image entering the lens and converting that information into transmittable electrical signals (CCD and CMOS).
- Size.
Recently The biggest advance for Drone FPV Camera features was the addition of a camera based On Screen Display (OSD) and this is now common in most popular cameras, also Real-time streaming is possible on the latest drones such as the DJI Mavic Air, Spark, Mavic Pro, the Phantom 4 Pro and the top professional Inspire 2 filming quadcopter.
Drone Gimbal |

A gimbal is a support system that allows an object to remain horizontal regardless of the motion around it.
It keeps your aerial camera in the same position in spite of the movement of the drone.
It is designed to keep your camera at the same angle regardless of the movement of the drone by automatically compensating using calibrated and often remotely controlled electric motors.
If you are hopeful to use your drone for photography, you may want to consider buying a gimbal, but before you start shopping for a gimbal, you do need to know if your drone supports a gimbal.
Most of the big manufacturers, such as DJI and Parrot, either have integrated gimbals or an exclusive line of gimbals that you can buy direct or through authorized retailers.
As you continue to research the right gimbal for your drone, gimbals come in many shapes, sizes, and combinations of features. Gimbals designed for specific drones will offer high end features that you may not be able to find from gimbals that are a little more universal.
There are some main features to consider when choosing a Drone Gimbal:
- Number of axes: Gimbals for drones are either 2-axis or 3-axis. 2-axis gimbals do not compensate for yaw, which means that there will be slightly more bump in your images. 3-axis compensates for yaw, but this feature comes at a cost. If you are spending the money on a gimbal, you should go for the 3-axis (Gimbals with 3-axis are generally heavier than their 2‐axis counterparts. A heavier gimbal means shorter flight times).
- Remote control: One of the benefits to buying a gimbal built specifically for your drone is integration into the flight controller. Some gimbals built for the DJI Phantom 2 can patch into the drone so that the camera’s tilt angle can be adjusted remotely.
- Camera support: Gimbals are designed with specific cameras in mind. There are some gimbals that come with support for multiple compact camera types. Primarily, you will find that gimbals are designed with support for the GoPro camera because of its wide use in action sports and aerial photography and videography. Make sure the gimbal you select supports your camera.
- Pre-Calibration: A gimbal that comes pre-calibrated and ready to simply plug and play is the fastest and easiest way to get up and running. Gimbals made specifically for your drone should almost always come pre-calibrated. Calibrating isn’t difficult, but it is one more step you have to take before getting airborne.
Regardless of what you decide to go with, remember that using any gimbal is better than not using a gimbal at all. The gimbal helps reduce vibration generated by your drone’s motors. The gimbal will also stabilize your video and pictures while in flight.
Once you have chosen the gimbal for you, installation should be an easy task. Zenmuse is a popular line of Gimbals by DJI that offer supreme technology and ease of use all bundled into one.
Drone Sensors |

Sensors are key components of any drone.
The sensor equipment is an important distinguishing feature in professional target markets.
Only sensor systems with suitable performance give commercial drones the flight characteristics they require.
The application possibilities of commercial UAVs are also determined by the sensors, different tasks need different sensors, or rather different sensor combinations.
Drones with sensors are bringing major benefits to many sectors including police surveys, Agriculture, Mining, Environmental, Search and Rescue along with many others.
There are some sensor types used in drones:
- Light detection and ranging (LIDAR) for collision avoidance, navigation and as a 3D scanner
- Range finders for collision avoidance and navigation
- PIN diodes for motion detection
- Cameras for observation, data acquisition, collision avoidance and navigation
- RADAR for collision avoidance and navigation
- Inertial measuring units (IMU) for navigation
- Pressure gauges for navigation and data collection
- GPS for position determination
Drone Collision Avoidance System |
During flight a UAV is exposed to strong airstreams which make a stable flight complicated. So one of the basic tasks for autonomous flight with aerial vehicles (drones) is the detection of obstacles within its flight environment and avoids them.
For new drone flyers, collision avoidance should be high up on your list.
This ultra smart tech uses sensors on your drone to detect how close it is to large obstacles and actively controls the drone to stop or re-route the drone away from a collision course. This means if you’re heading straight for a large tree, the drone can sense it in front of it and make sure you don’t crash into it, all done automatically too!
As drone operating distances increase and pilots start operating out of the line of sight, a level of collision avoidance is necessary to ensure safe operation of the drone. Even pressing the return to home button does not guarantee a safe return for the drone, this however is if it doesn’t have collision avoidance built-in.
Collision avoidance systems used to be reserved for expensive commercial and military drones.
However, as the sensors become more affordable, we are starting to see the technology on more accessible light domestic drones.
Today, companies such as DJI are starting to deploy more advanced sensors such as ultrasonic, infrared and monocular vision.
This gives them the capability to detect obstacles, above, below and to the side of the direction of flight.
This makes them much more capable machines, they can operate at much greater distances out of the line of sight from the pilot.
Bellow the Latest obstacle detection and collision avoidance drones from DJI. Some of these drones are aimed at specific professions, such as the filming, photography …
Drone Landing Gear |

Landing gear system is a major component of every aircraft.
It serves a triple purpose in providing a stable support for aircraft at rest on the ground, forming a suitable shock-absorbing device and acting as a rolling chassis for taxiing during manhandling.
It is the mechanical system that absorbs landing and taxi loads as well as transmits part of these loads to the airframe so that a majority of impact energy is dissipated.
The main functions of the landing gear are as follows:
- Energy absorption
- Braking.
- Taxi control
The important types of landing gear are as follows:
- Tri-cycle type (nose gear in fuselage and main gear on wing)
- Bicycle type (with or without outriggers)
- Tail-gear type
To end this article, i hope you find it so helpful to understand basic information on all quadcopter’s component , and i hope you have gathered enough confident to start build and troubleshot your own drone.

